 德阳吧
德阳吧
此外,分配给每个部件的装载和检查的时间都是有限的,可能会导致工人匆忙检查。更重要的是,由于不同的工人可能从不同的角度查看相同的焊缝,因此在检查过程中缺乏一致性。
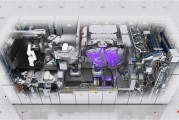
正是考虑到这些限制,德国政府的EASY COHMO(非接触式人机操作人体工程学辅助系统)项目应运而生。在弗劳恩霍夫通信技术研究所的领导下,这个多小组合作项目的任务是开发一个系统,在这个系统中,机器人臂将自动从装配线上取下零件,然后在人类检查员面前举起它们。

利用语音命令,加上手势识别界面,投影到工作台和零件本身,机械臂将指示将零件放在正确的位置,以便检查其焊缝。如果焊缝有任何问题,同样可以通过手势或语音记录,并利用手指追踪系统记录其位置。
项目团队希望这种设置能最终减少工人的伤害,同时也能提高工作效率,减少遗漏的缺陷数量。根据计划,该技术将首先被集成到项目合作伙伴大众汽车的生产设施中。




发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。